
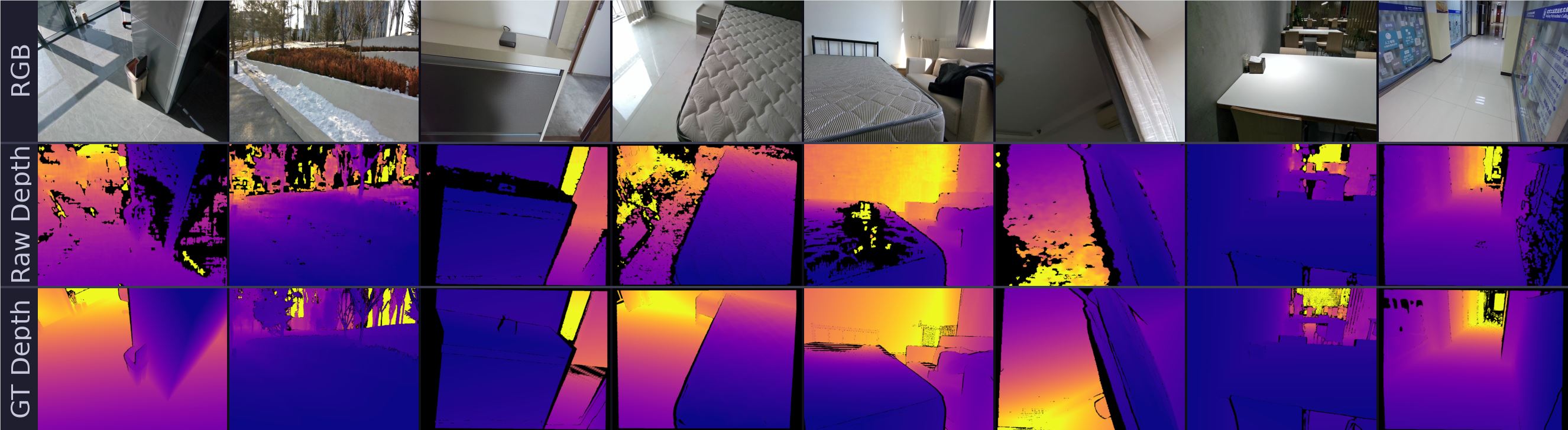
4月16日,蚂蚁灵波科技正式宣布开源流式三维重建模型 LingBot-Map。该模型突破性地实现了仅依靠单个普通 RGB 摄像头,即可在视频采集过程中实时估计相机位姿并重建场景三维结构。这一进展为机器人导航、自动驾驶及 AR 硬件等需要即时空间感知的应用场景,提供了高效、稳定且连续的在线建图能力。

技术层面,LingBot-Map 采用流式处理架构,改变了传统方法需预先采集完整序列再统一处理的局限,实现了边接收画面边输出定位与结构的实时交互。在国际主流评测中,该模型表现出色:在极具挑战的 Oxford Spires 数据集上,其轨迹误差仅为此前最优流式方法的三分之一,甚至优于部分离线处理算法。性能指标显示,LingBot-Map 支持约20FPS 的实时推理,并能在超万帧的长视频运行中保持精度几乎不衰减,兼顾了高精度、高速度与长时稳定性。
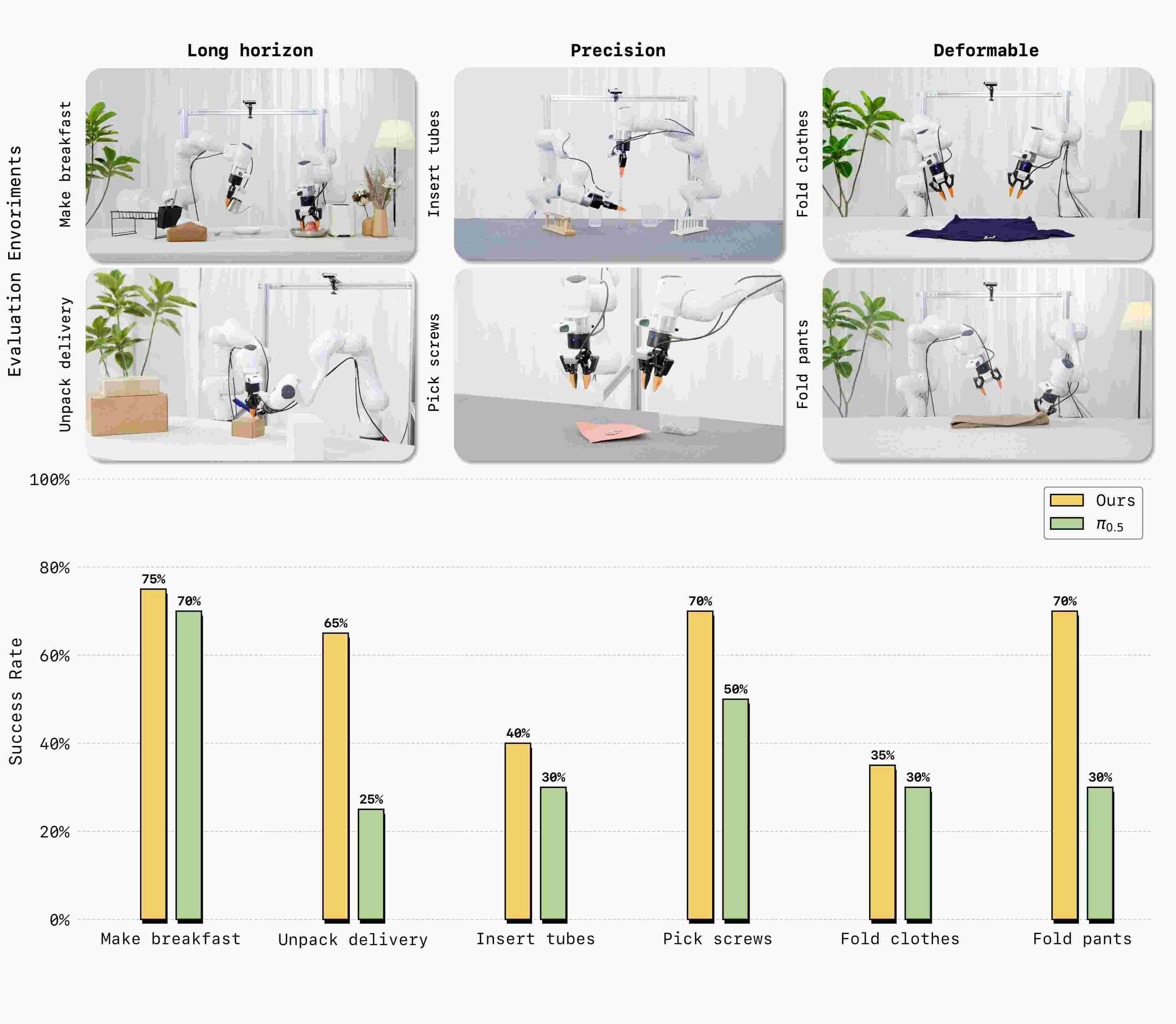
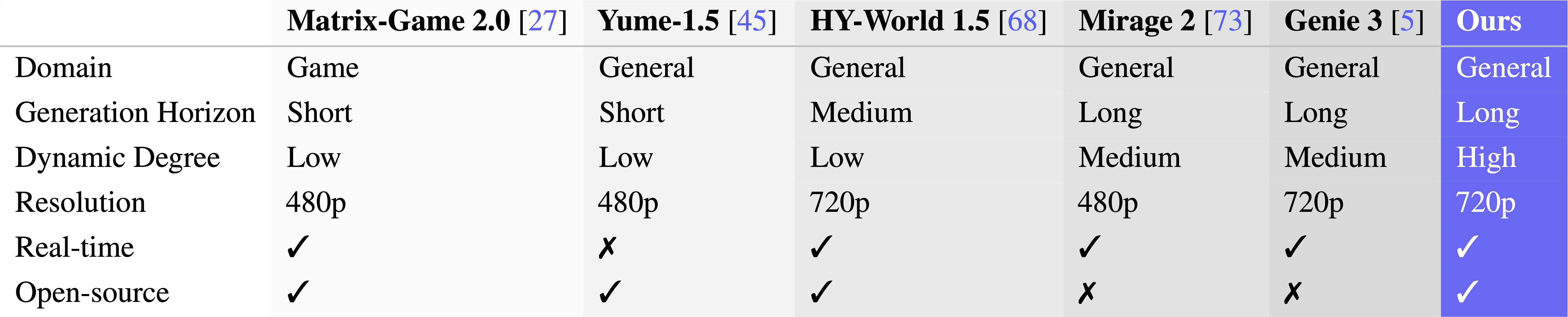
此次 LingBot-Map 的发布,是蚂蚁灵波继深度估计(Depth)、大语言动作模型(VLA)及世界模型(World)等系列成果后的又一重要动作。通过补齐实时空间理解这一核心环,蚂蚁灵波进一步夯实了其具身智能“基座”的完整性。该模型的开源不仅降低了高精度三维感知的硬件门槛,更将加速具身智能设备在复杂动态环境中的感知与决策进化。
下载链接:
Hugging Face:https://huggingface.co/robbyant/lingbot-map
ModelScope:https://www.modelscope.cn/models/Robbyant/lingbot-map

发评论,每天都得现金奖励!超多礼品等你来拿
登录 在评论区留言并审核通过后,即可获得现金奖励,奖励规则可见: 查看奖励规则