内容持续更新中
近日,蚂蚁灵波科技与香港科技大学等高校合作完成的研究论文 《Causal World Modeling for Robot Control》被国际机器人顶级学术会议 Robotics: Science…
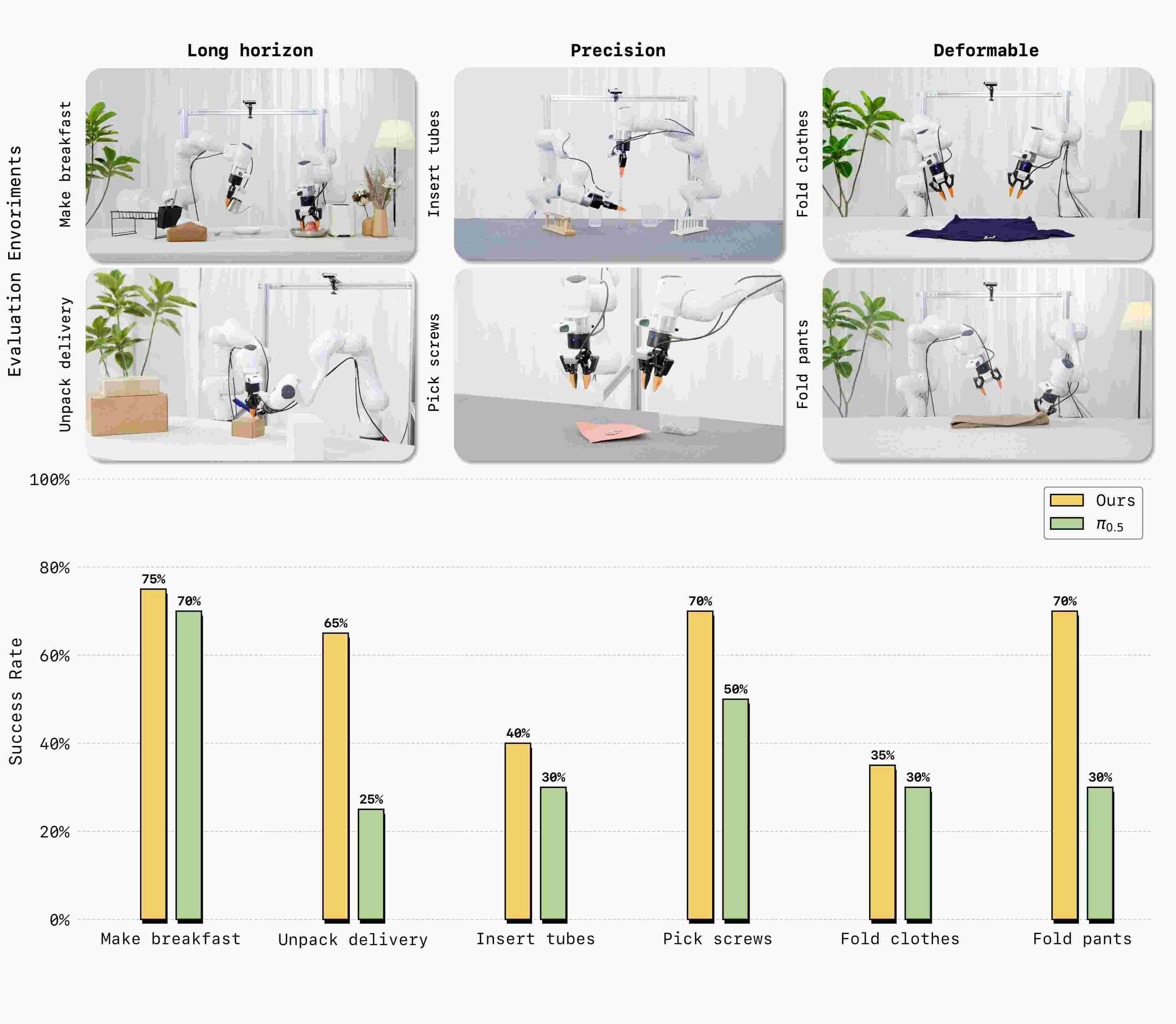
1月30日,继空间感知模型、具身大模型与世界模型“三连发”后,蚂蚁灵波科技今日宣布开源具身世界模型 LingBot-VA。LingBot-VA 首次提出自回归视频-动作世界建模框架…